Service robots are accelerating into our daily lives at a high rate of growth. According to the latest statistics from IFR, the service robot market will reach five times the current scale in the next three years. Based on the broad market prospects, the National Science Foundation of the United States has promulgated the American Robotics Roadmap, in which service robots are discussed as a separate chapter. Knowing ourselves and knowing the development trend of service robots in the United States can better help us keep pace with the times.
In the last issue, we published the "National Service Robot Technology Roadmap (I)", which detailed the development path of service robots in the United States and the world from the development status, strategic layout, and challenges of service robots in the United States. In this issue, we will further deepen and elaborate on the next stage of the US strategy from the aspects of application and technology development. I believe that after reading this article, you will form a comprehensive understanding of the US planning in the field of service robots.
Key challenges and capabilities
Sample scenario
â— Quality of life
Robot technology hopes to bring great improvement to the quality of life of the elderly and the disabled. For example, a revolutionary transport mobile solution enables wheelchair-accessible people to enter and exit vehicles independently. This system allows people who rely on wheelchairs to use ordinary passenger cars without the help of others, thus giving them independence and freedom that they did not previously have. This system offers significant advantages over existing transport mobile solutions, including lower cost, the use of standard collision-detected car seats, more ride options, and no need to retrofit vehicle structures.
â— Agriculture
In agriculture, robotics also hopes to help farmers reduce costs and increase productivity through a large number of applications. Mechanical harvesters and other agricultural machinery require professional drivers to work effectively, while factors such as labor costs and operational fatigue increase agricultural costs and limit the productivity of these machines. Automated operations, such as spraying pesticides, harvesting and picking, offer the potential to reduce costs, increase safety, increase output, increase operational flexibility, nighttime operations, and reduce chemical use. A large number of prototype systems and applications, including automatic fruit pesticide spraying operations, have been developed for agricultural harvesting. These technologies have matured to the extent that they can be commercialized and used in the next few years.
â— Infrastructure
Robotics has enormous potential for automated inspection and maintenance of bridges, highways, pipelines and other infrastructure throughout the country. Currently, by providing accurate and detailed pipeline status information, robotics has been used to develop automated pipeline inspection systems, reducing maintenance and recovery costs. A system based on advanced multi-sensors and other robotics technology for detecting underground buildings and the environment. It is often difficult to achieve these tests, including large diameter pipes, long distance extensions, inversions, crowns, culverts, inspection wells, and in-service inspections. These robotic platforms use a waste water pipeline to detect drain pipes that are difficult to access in a conventional manner, resulting in a very accurate three-dimensional image of the inner surface of the pipe. The detection information is captured in digital form for future detection and automatically calculates the evolution of the defect location over time.
â— Mining
Robotics has begun to have a huge impact on the underground and surface mineral industries. An innovative conveyor inspection system uses high-speed machine vision systems and software algorithms to monitor the condition of the conveyor belt and provide operator with fault detection. This detection system has been used in several underground coal mines. A dedicated protection system is used to reduce the costly downtime due to chipping at the belt joints. On a larger scale, robotics is used to develop autonomous transport trucks for mines. Caterpillar developed an autonomous mine transportation system by 2015, integrating several autonomous transport trucks, each with a capacity of more than 240 tons. Autonomous technology promotes and increases productivity by providing consistency in the production process while minimizing environmental impact, ultimately improving efficiency and improving overall mining safety.
â— Transportation
Robotics will significantly impact passenger and cargo aspects in the coming decades, from personal transportation systems to smart highways to smart public transport systems. Companies such as Segway and Toyota have introduced personal transport system robots, where occupants ride such robots in a standing position, and internal sensors that continuously monitor the position of the occupants control the movement of the robot and make automatic adjustments. At the same time, automakers and equipment manufacturers also manufacture smart vehicles that provide occupants with better environmental perception and driving experience by installing higher performance computers and sensors.
Nevada and Florida have passed laws that allow the use of unmanned vehicles. In Nevada, two cars were awarded a driver's license (one from Google and one from Audi). Driving a road with only a 5% increase in capacity can result in 3.7 billion driving hours delays and 2.3 billion gallons of fuel wasted.
To solve this problem, the Highway Administration tried to create a smart road by installing sensors, cameras and automatic toll readers. A public-private joint domestic organization, Vehicle Technology Vehicle Facilities Integration Organization (VII), has begun to integrate intelligent vehicles and intelligent roads to create virtual traffic information networks while solving traffic congestion problems. The mass transit system also hopes to use robotics to provide operators with greater location, perceived capabilities and the ability to provide navigation assistance in crowded urban corridors. Therefore, robotics will help control transportation costs and increase transportation safety.
â— Education
Robots have begun to change the classroom in the United States. Robots embed academic concepts into the classroom and use them in all K-12 and college education. The robot provides an integrated means of acceptance for students to investigate the basic concepts of mathematics, physics, computers, and other STEM disciplines, while enabling teachers to introduce concepts of design, innovation, problem solving, and teamwork. Robotics courses have been developed and teachers have also passed training. Every year, the results of the nationwide robot competition will be saved. Probably the most well-known robotic competition was founded by FIRST, a non-profit organization founded in 1989 to inspire young people to become leaders in science and technology. As an indicator of the popularity of robotics, FIRST hopes to have more than 320,000 students participating in the competition. More significantly, a survey by the University of Brandeis found that in a similar background and academic experience, the FIRST competition's pursuit of science and technology is twice as high as that of non-FIRST contestants. Although much progress has been made, the current advancement is only a layer of skin on the potential impact of robots on education. To more fully exploit this potential, robots for students and teachers need to be more accessible, cheaper, and easier to use.
â— Local security and defense
When robotics is used for homeland security and defense, it is an innovative technology that provides a variety of means for search, rescue, detection, explosion protection, fire detection and other applications while also increasing the viability of the mission. Unmanned detection, detection and response systems use robotic platforms, fixed sensors, command and control network systems to monitor and patrol hundreds of miles of harsh boundary terrain, find and locate chemical/biological/radiation/nuclear/explosion threats, and investigate The vast surroundings of borders, power plants and airports. Such a system enables security personnel to automatically detect potential hazards, observe dangerous objects from a safe distance, and, if necessary, provide initial damage and block the storage of dangerous materials. Other portable robots equipped with infrared cameras, night vision sensors and millimeter wave radars have been used to search for survivors of disaster sites, such as the World Trade Center.
Ability roadmap
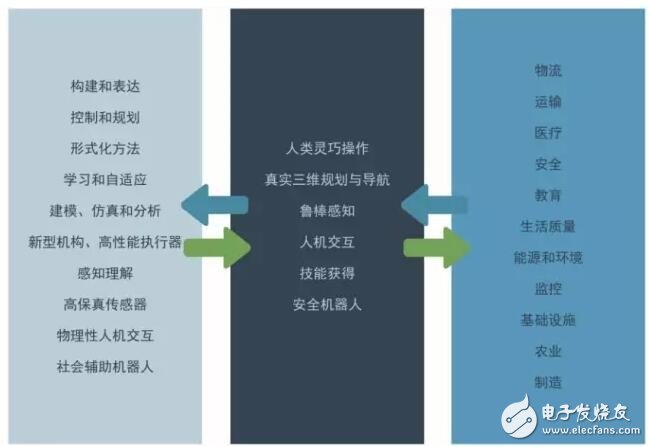
Figure 1: The continuous progress in the basic research field in the left column will promote the development of a large number of basic functions, as shown in the column. The right column is a progression of these features in the field of application.
In order for the service robot to solve the above problems, we have given the main challenges that must be faced and the key capabilities that must be cultivated. Figure 1 outlines the planned route and the rest of this document. In the figure, the right column lists the application areas, many of which have been described in previous scenarios. These areas of application have only made significant progress when autonomous robots have a significant portion of their technical capabilities. These abilities are listed in the middle column of the picture. In order to achieve the level required by robotics, continuous investment research and development is required in a range of basic research and technology.
â— Move and operate
Autonomous service robots accomplish their tasks by moving in their work environment and interacting with the environment. These movements and physical effects need to be achieved by changing the position of the robot and the movement in the environment. The completion of the task is likely to require complex motion and interactive procedures: the robot may need to move from one room to another, or it may need to open the door, climb stairs, use the elevator, clear obstacles in the path, remove obstacles, or use tools. In order to have these capabilities, there is a need for substantial advances in robotics in sensing, control, and cognition. The problems caused by service robots can only be solved through a comprehensive solution.
When the robot walks to a different floor room to pick up the box, it should be considered that the difficulty of the task depends on the size of the box, and to find a good way to hold, lift the box, and through the small space, avoid the other things the robot has to cross in the environment. aims. To push the box (or lift it), the robot needs to estimate its capabilities, spatial geometry, drive and joint constraints, and the dynamics and friction of the contact during motion.
In order to get the way your own actions and movements work, the robot needs to be familiar with its surroundings, because not all the required information can be provided. Therefore, when a robot is running in an unstructured and dynamic environment, it needs to have the ability to perceive objects and calculate their properties in the environment. "Semantic mapping" provides the robot with the environment needed to complete a task. Target detection and recognition and associated perceptual capabilities provide the ability to semantically map, navigate, and target operations.
Through continuous research and development in 5, 10, and 15 years, the following goals may be achieved:
· 5 years: Robots use a variety of research mechanisms in the laboratory to navigate safely and stably in an unstructured 2D environment, enabling simple selection and placement of tasks with a simple mechanism and specific Attributes. The robot generates an environmental semantic map by detecting and interacting with human instructions. They can infer complex tasks such as removing obstacles, opening cabinets, etc., and entering other targets.
• 10 years: Gives a rough and possible incomplete model of the static part of the environment (possibly giving an Internet database, etc.), and the service robot can reliably plan to perform a task. Orienteering robots can build depth perceptions of the environment and build their own physical movements and understanding commands. The robot completes the navigation of the multi-layer environment by going up and down the stairs, and also increases the environment to increase the chances of achieving tasks (such as removing obstacles, clearing obstacles, turning on the lights), detecting and recovering some faults. Service robots must enable multiple flow structures, such as legs, tracking equipment, and wheels, to perform high-speed, non-conflicting movement operations in a new, unstructured dynamic environment.
• 15 years: A service robot that includes multiple motion mechanisms such as legs, tracks, and wheels to perform high-speed, collision-free movement operations in a new unstructured dynamic environment. They translate their environment appropriately, perhaps as an environment (global map) of the environment, overall or local, and long-term environment in which a particular task is performed. Use them to continuously plan to achieve global goals. They are able to respond strongly to dynamic changes (for example, due to accidental disturbances being pushed or squeezed). Through task orientation, they are able to explore interactively, and through interaction with the environment, they can intelligently modify tasks to ensure and facilitate their task completion. These include the inference of physical properties (sliding, pushing, throwing, etc.) between robots, between contact targets, and between static parts of the environment.
â— Real world planning and navigation
Since 2009, the real world planning and navigation field of service robots has been developed on the main path. These developments are still in the US Robot Roadmap report. At that time, the focus was on navigating space and obstacles with limited empirical knowledge in highly unstructured situations. The robot needs to acquire and perceive data to establish an environmental model to be planned. In the implementation of these plans, additional sensory information will be used for feedback, even for small quantities of robots for non-real-time planning and control in a laboratory environment.

Examples of deployment of autonomous mobile service robots in logistics and medical applications - from: SymbioTIc, Aethon, and Kiva systems
In highly unstructured environments, progress has been made on challenging issues. Since 2009, the most significant changes have occurred in service robot applications for large fleets that can be planned and controlled in real time. The environment and tasks there are more structured, and its applications include logistics and materials processing, health care and agriculture (Figure 2). These applications are not only important in technology development, but also service robots are more valuable in solving real-world problems. . Effective social interpersonal interactions and the core competencies of their interfaces must follow a people-centered design process and rigorously evaluate stakeholders. User surveys in this process may include targeted healthy populations in the early design process, as well as design iterative assessments that are formed and extend to patients, physicians, families, therapists, and other members of society. . In this field, the key method of research and development is to find suitable measures to successfully achieve natural communication, make the connection between environment and health applications real and effective, and develop real-time measurement information input into the robot system. A method of conducting online assessments and learning.
The following data helps to understand the current technology when operating a stand-alone installation, the number of fleets is between 10^3 and 10^4.
• The speed of real-time navigation and mission planning, between 10^4 and 10^5 tasks per hour or transaction.
• Included in 2D and 2.5D, obstacles and obstacle navigation in network technologies defined by maps, such as warehouses and hospital corridors. 2.5D is derived from coordination between planning and control tasks on multiple floors or at different levels.
• Coordinate the tasks of multiple robots to complete their synchronization.
• Tasks, including the task of perceiving and manipulating goals to accomplish prior knowledge. When the robot arrives at the local scene, the task description is enhanced by sensing information.
• Re-planning the ability to dynamically solve problems, such as mission failures, obstacles, or collision avoidance, including the same operating environment in which someone exists.
High level of robot planning and control integration, such as logistics supply chain or hospital information systems.
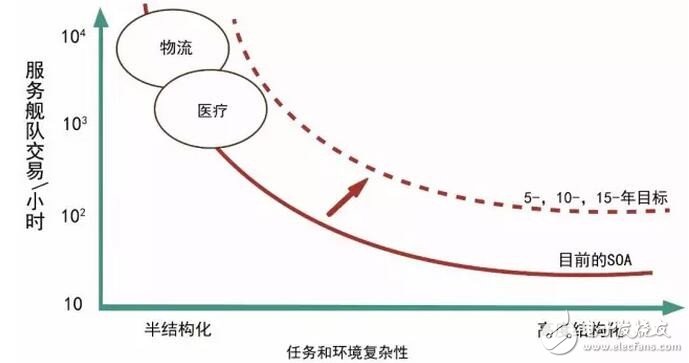
Figure 3 is a description of real-time performance metrics and degree structures in the operating environment and tasks. The current roadmap envisions pushing the upper right limit to improve capabilities in uncertain and complex operations.
Here are the scenarios that produce this positive effect:
• Stochastic Planning – Consider a defined planning and control problem for an uncertain model. A simulation using the proposed planning and control strategy system is effective only if the simulation represents the real world. Real-world field experiments will reveal the need for simulation to better simulate the real world. If the constant is replaced by statistical parameter data, a new dynamic component or a model of the failure mode is added to find the limit of the robustness of the strategy through simulation. In the next five years, in order to use the initial uncertain features to develop planning and control, the research challenges may come from direct methodological research. A truly powerful planner in reality will be able to use the advantages of statistical knowledge to establish conditional planning for the environment. Predictive planning will increase the safety and efficiency of the mission, and the robot will be able to operate based on built-in uncertainty.
· The effectiveness of the current model automatic detection - in the next 5 to 10 years, the robot is expected to work longer. In a highly dynamic environment, the time of statistical model planning may not correctly characterize the environment over time. Through a robust approach, the detection on the aircraft still uses the model, not the inseparable part of the control loop. The goal for the next 5 to 10 years is to improve the ability of the robot to integrate data acquired by sensors in the execution plan, based on the updated basic static statistical model, and decide when and how to plan. Our development goal is to build a system that can be generated and updated, and it can be supervised for a long time without interruption.
Imitation and transfer learning - Service industry robots applied to the fleet can re-plan tasks by requiring frequent knowledge accumulation, error pools, and intrusion of uncertainties. Even if the incidence of each type of re-planning is low, we will still see these problems reappear. Learning is another option to solve every re-planning problem. It should be able to know the mistakes that have occurred before, and more importantly, it can also prove the effectiveness of re-planning. A 10-year goal is to combine traditional planning techniques with reliable machine learning methods to re-recognize the problems of repetitive planning that occurred before and to choose the optimal solution. Many of the results have been applied in the field of imitation learning and transfer learning. Although the planning is continuous, the final execution plan is characterized by continuous execution of trajectories, but from a more abstract point of view, it is possible to anticipate frequent building blocks and disturbances. Sharing, reuse planning, and the ability to perform complex sequences of actions in the event of an emergency are necessary. In the next 5 to 10 years, robots should be able to contribute their plans to the local knowledge base and share them with other robots. This effectively determines the plan and can be applied repeatedly without having to solve complex problems from scratch. In the long run, large-scale, efficient retrieval of database robots should be available on a planetary scale.
Human monitoring operation - taking the analogy of the aircraft operator, the operator has a situational awareness: there are hundreds of aircraft in his space, the aircraft is driven by human pilots, and command information can be communicated through the driver ( Figure 4). This situation will change in the near future, along with the introduction of drones at ordinary airports. In comparison, with current logic and medical flight fleet equipment, supervisors can present the current state of the system while processing fairly limited sensor data. However, when the number of aircraft reaches 1000~10000, and the amount of interaction between 10,000 and 100,000 times per hour, the monitoring personnel has reached the limit. Understanding this state requires not only the state of the system, but also the planning of each robot and how they communicate with each other and the uncertain environment in which they are exposed. Advances in this area can be measured by a pie chart, that is, the ratio of monitors to monitored vehicles, from 100 for the current 10 to 5 years, to 1000 for 10 years. The hierarchical model of this system is used to ensure that the monitor zooms in on the scene at the appropriate level and automatically adjusts at a certain level without monitoring.
â— Cognitive ability
In service robotics, there is a need to operate in a non-engineering environment, to gain new knowledge through user demonstrations, to interact with users to complete tasks and status reports, and to ensure that new systems are available. Models and new skills that can be used to train future movements. Cognitive ability is necessary for regular human-computer interaction and the lack of opportunities to control the development of user training. In addition, in order to cope with the increase in the intelligence of non-engineering environments, it is also necessary to ensure the reliability of the system. After 5, 10, and 15 years, the following goals are possible under current research and development conditions:
· 5 years: Prove that robots can learn skills through human gestures and language interactions. In addition, an indoor environment model for non-models is obtained.
• 10 years: Robots can interact with users to acquire new skills to perform complex assemblies and actions. The robot has a device that can recover itself from simple errors.
· 15 years: A robotic partner who can help users by adjusting skills in a series of service tasks. This kind of human-computer interaction helps the operator based on the inherent cognition and re-planning of human beings.
â— Reliability awareness
Because service robots are used in relatively unconstrained environments, there is a need to provide reliable sensing capabilities to cope with environmental changes. Perception is critical to navigation, interaction with the environment, and interaction with users and task objects in adjacent systems.
Today, perception is focused on the recovery of geometric shapes, the cognition of goals, and the contextual understanding of semantics. We need to improve the algorithm to go beyond the cognitive and geometrical reach of task-related feature entities, such as task objects (rigid and deformable), files, environments, or people. Such features include: material properties, task object availability, human activity, interactions between people and objects, and limitations of physical entities from the environment. These are all indispensable conditions for the development of advanced robot capabilities.
In the next 5, 10, and 15 years, the following tasks are possible in the current research and development:
• 5 years: Perceptual algorithms should be combined with information in large venues – homes, highways, hospitals, storage banks – to perform reliable operations. The robot will be able to detect the characteristics of different environments and operational objects related to the task, and be able to recognize and point out hundreds of operational objects in a chaotic environment in the search number.
· 10 years: The basic operational capabilities in a static environment will be extended to dynamic systems. This will prove the robotic system, able to detect dynamic events and human activities. This allows you to learn from humans and collaborate with humans. In order to control the field, algorithms such as smart robots, flexibility, human-computer interaction and other tasks to innovate special robot perception are necessary. The development of large-scale learning and improved perceptual adaptation methods is essential for system development that can operate over extended periods of time.
· 15 years: Prove that a robot can integrate multiple sensory modes, such as processing sound, range, vision, GPS and inertia, to obtain models of the surrounding environment, and use these models for navigation, search, man-machine Interact and interact with other novelties. The focus of the future is to realize the long-term operation of the robot in a complex and dynamic environment, and at the same time realize the sensory ability of the robot in the human-computer interaction mode.
â— Physical and intuitive HRI interface
Whether deploying professional or home service robots, interfaces are needed to make it easier for users to access the system. Robots deployed in the community need to provide the simplest interface so that users can operate with simple training. There are two types of interfaces: the physical interface that accompanies the user; and the command interface that controls the robot. Physical interfaces, including body motion and non-contact interaction of moving objects, such as changing behavior by conveying intentions and states. The command interface is required for task scheduling and status reporting to allow the user to understand the behavior of the robot.
Through 5 years, 10 years, and 15 years, through continuous research and development, the following goals can be achieved:
• 5 years: Proof of polymorphic sessions for simple action modes, which can promote task commands more effectively, and robots can convey the intent of body movements.
· 10 years: It can be proved that a well-programmed robot can be used to learn complex tasks, such as preparing lunch for an ordinary person.
15 years: It can be proved that in the current task timing, the operator can design the robot to complete complex tasks.
â— Skill acquisition
Service robots must achieve the ability to solve new tasks by continuously improving performance, which requires service robots to have the ability to learn new skills themselves. Skills can be obtained in a variety of ways: by reading skill pools to acquire skills that other robots already possess; by continuous training or in error; by observing the movements of people and other robots; by human or robotic indicators. However, the acquisition of skills also requires the robot to be able to discern which skills are used in which scenarios to be successful. Skills can be parameterized. The ability to learn and select appropriate parameters in different scenarios is also included in the ability to acquire skills. . The ability to transfer skills from one domain to another, or the ability to pass experience from one skill to another, means that the robot has an essential improvement in its ability to acquire. Improvements in sensation, reproduction, machine learning, planning, control, behavioral recognition, and other related areas can promote robots' ability to improve their learning skills.
In 5 years, 10 years, and 15 years, through continuous research and development, the following goals can be achieved:
· 5 years: Robots can learn a series of basic skills by observing, trying, correcting, and proving. These skills can be successfully applied to many situations that are slightly different from the acquired abilities. When there are subtle differences in the situation, the robot can automatically express the adaptability to the learned skills through the initial setting.
• 10 years: As sensory abilities increase, robots can acquire more complex skills and determine the conditions under which they can be used, and composite capabilities can be integrated into more complex capabilities. The robot can automatically determine and indicate the type of situation in which the skill can be successfully used. Robots have a good understanding of the factors that influence success, allowing them to manage the planning process and maximize their chances of success.
• 15 years: Robots continue to acquire new skills and improve the productivity of the acquired abilities. It gains skills-independent knowledge that translates into simple skills in complex tasks and scenarios, or new tasks. The robot recognizes the general pattern of simple and combined skills.
â— Safety robot
Now, the safety of the robot can be obtained by clearly dividing the working area of ​​the person and the robot. As people and robots become more and more intertwined, they need to be explicitly considered to enable operators to operate high-speed robots at a relatively safe distance.
Therefore, this requires consideration of standard safety certification. Now, whether it is a professional robot or a personal robot, the standards for safety certification are not sufficient. These are not enough to drive innovation, slowing down the pace of promotion, while increasing costs.
From a technical perspective, security involves multiple aspects, including the need for advanced perception capabilities, and is used to detect objects, people, and languages. When faced with potentially dangerous scenarios, there is little loss of contact with people and objects through the solidified safety behavior mechanisms in the control system. However, security is a multi-layered theme of future technology, including government and a range of industry standards, independent certification and default risk. This requires an increase in non-technical factors. For example, existing professional robots and personal robot standards, in order to show stakeholders, the need for rapid rapid innovation and application.
In 5, 10 and 15 years, with continuous research and development, the following goals are likely to be achieved:
·5 years:
1. Service robot safety standards for all categories have been defined and widely accepted.
2. Intrinsically Safe (Hardware and Software) Professional mobile robots can work with trained humans in all professional environments (manufacturing, hospitals, laboratories, factory floors, warehouses, etc.) with control.
3. Intrinsic (hardware and software) personal mobile robots that work with humans (families, hotels, schools, geriatric hospitals, etc.) in all professional environments without manipulation.
4. The personal base operating system has the first version of the implementation of the security standards.
·10 years:
1. Intrinsically Safe (Hardware and Software) Professional mobile robots work in unison with untrained humans in all professional environments.
2. Intrinsically safe (hardware and software) personal mobile robots that work with people in all professional environments with maneuvering.
·15 years:
Intrinsically safe mobile robots, in the case of manipulation, work in unison with untrained humans in all public, personal, professional environments.
Basic research / technology
Architecture and expression
Over the past 20 years, models established by some systems organizations have emerged, but no agreement or overall framework for system organization has been implemented. For autonomous navigation, flexibility, and manipulation, there are some established methods, such as 4D/RCS and hybrid negotiation architectures, but once interactive components such as human-computer interaction (HRI) are added, there is rarely a common model protocol. In the past few years, the cognitive system field has tried to study this problem, but so far, there is no unified model.
For the widespread adoption of robotic systems, it is necessary to establish an architectural framework that facilitates system integration, component modeling, and formal design. The appropriate architectural framework is essentially dependent on the task application domain, the robot or various other factors. Any of the above frameworks is closely linked to an appropriate set of presentation capture environments and the impact of objects included therein, such as robot performance, domain name information, and descriptions of robot tasks.
Control and planning
Since service robots need to dynamically solve real-world problems, the emergence of an unorganized open environment is a novel challenge in the fields of robot control algorithms and operational planning. These challenges stem from the increased demand for autonomy and flexibility in the robot's actions and task execution. A sufficient algorithm for control and motion planning will capture high-level motion strategies that adapt to sensor feedback. Research challenges, including sensing methods and planning, uncertainty considerations in control algorithms; presentation of combined feedback signals and development of motor strategy capabilities; constrained motion, resulting from kinematics, dynamics, and nonholonomic systems; Object characteristics in the environment; development of control and planning algorithms for hybrid systems; understanding the complexity of these algorithmic issues in control and motion planning.
cognitive ability
In the past few decades, great progress has been made in the perception and perception processing. Such as web-based search, such as face recognition in Google Images and security applications. Positioning and localization in the natural environment is also possible in the engineering environment. In the past decade, the use of laser scanners and GPS in particular has changed the design of navigation systems and contributed to a new generation of solutions. In the past five years, the use of RGB-D sensor technology and the opening of the robot software framework have made great progress.
Nonetheless, positioning and planning in a common GPS-free environment remains an important area of ​​research. In addition, we have made great progress in image recognition and expansion of large databases. In the future, there will be a large number of robots that will rely on their own sensory feedback, and the application domain will go beyond the previous model settings. Therefore, it is necessary to provide robustness to the dependence of multiple sensors and the fusion of sensing information. In particular, the use of image information is worth looking forward to and will play an important role in robotics. Vision plays a crucial role in the new mapping approach, in facilitating the capture of new objects, the classification of objects, and the identification of over-instance and flexible user interface design.
Reliable high fidelity sensor
In the past decade, advances in microelectronics and packaging have led to a revolution in sensory systems. Image sensors have surpassed broadcast quality to provide megapixel images. MEMS technology makes a new generation of inertial sensor packaging possible, and RFID makes it possible to track packages and people more efficiently. Due to the widened operating range, we will need new sensors to ensure the robust operation of the system. This requires a new approach to robust control, but more importantly, a powerful data sensor is provided to accommodate significant dynamic changes and poor domain data resolution. New methods of silicon fabrication and next-generation MEMS sensors will be key aspects of future robot development.
New mechanism and high performance actuator
There are intricate interactions between mechanical devices, braking, and the development of algorithmic complexity based on functions. Some solutions to algorithmic problems can greatly facilitate intelligent mechanical design.å› æ¤ï¼Œæœºæ¢°è®¾è®¡å’Œé«˜æ€§èƒ½é©±åŠ¨å™¨çš„å‘展,很å¯èƒ½åœ¨å…¶å®ƒåŸºç¡€ç ”究领域和线路图所列功能ä¸ï¼Œå–å¾—çªç ´æ€§è¿›å±•ã€‚é‡è¦çš„ç ”ç©¶é¢†åŸŸåŒ…æ‹¬æœºæ¢°è®¾è®¡ã€å¼€å‘符åˆåˆè§„性和å¯å˜æ€§ã€é«˜åº¦çµå·§çš„机械手ã€èŠ‚能性ã€å®‰å…¨æ€§ã€é«˜æ€§èƒ½é©±åŠ¨å™¨ã€é«˜æ•ˆèƒ½åŠ¨æ€æ¥è¡Œè€…ç‰ç‰ã€‚
专家特别感兴趣的是“智能â€çš„机构设计。通过它们的设计,机构设计å¯ä»¥å½’入一个åªé€šè¿‡æ˜¾å¼æŽ§åˆ¶æ¥å®Œæˆçš„å‡½æ•°ã€‚è¿™æ ·çš„ä¾‹å包括自我稳定机构,或是ä¸éœ€è¦æ˜¾å¼æŽ§åˆ¶å°±å¯ä»¥å®žçŽ°å½¢å°é—的特殊的机械手。
å¦ä¹ 和自适应
æœ¬ç« ä¸æè¿°çš„è®¸å¤šåŸºç¡€ç ”ç©¶é¢†åŸŸï¼Œéƒ½èŽ·ç›ŠäºŽå¦ä¹ 和适应技术的进æ¥å’Œåº”用。æœåŠ¡æœºå™¨äººæŽ§åˆ¶ç€å¤æ‚的环境,处在一ç§é«˜ç»´çš„状æ€ç©ºé—´ä¸ã€‚关于环境和机器人状æ€çš„知识,实质上是ä¸ç¡®å®šçš„。机器人的动作往往是éšæœºæ€§çš„,其结果å¯ä»¥ç”¨åˆ†æ•£æ€§æ¥æ述。许多决定机器人动作结果的现象很难,甚至ä¸å¯èƒ½å»ºæ¨¡ã€‚机器å¦ä¹ 技术,æ供了一个有å‰é€”的工具æ¥è§£å†³ä¸Šè¿°å›°éš¾ã€‚这些技术å¯ä»¥ç”¨äºŽæœºå™¨äººä»»åŠ¡æˆ–环境å¦ä¹ 模型的建立ã€æ›´æ·±å±‚æ¬¡çš„ä¼ æ„Ÿå™¨å’ŒæŠ½è±¡ä»»åŠ¡çš„æè¿°ã€ä»¿çœŸå’Œå¼ºåŒ–å¦ä¹ ã€æŽ§åˆ¶æ”¿ç–çš„å¦ä¹ ã€æœ‰æŽ§åˆ¶æž¶æž„çš„æ•´åˆå¦ä¹ ã€å¤šä¼ 感器信æ¯ï¼ˆä¾‹å¦‚视觉,触觉)的概率推ç†æ–¹æ³•å’Œç»“构性时空陈述,å¯ä»¥åŠ 快机器人å¦ä¹ 与适应技术的å‘展。
物ç†ä¸Šçš„人机交互
æ™®éå˜åœ¨äºŽå·¥ä¸šæœºå™¨äººé¢†åŸŸçš„安全å£åž’å·²é€æ¸æ¶ˆé™¤ï¼Œæœºå™¨äººå°†æ›´å¤§ç¨‹åº¦ä¸Žäººç±»åˆä½œï¼Œæ‰§è¡Œä»»åŠ¡å’Œç¤ºèŒƒç¼–程。作为这项工作的一部分,机器人将与用户有直接的物ç†æŽ¥è§¦ã€‚首先需è¦æœ‰å®‰å…¨æ–¹é¢çš„æ…Žé‡è€ƒè™‘。æ¤å¤–,å¦ä¸€ä¸ªéœ€è¦è€ƒè™‘çš„å› ç´ æ˜¯å¦‚ä½•è®¾è®¡è¿™äº›æœºå™¨äººçš„äº¤äº’æ¨¡å¼ï¼Œä½¿ä¹‹èƒ½å¾ˆè‡ªç„¶åœ°è¢«ç”¨æˆ·æ„ŸçŸ¥ã€‚这涵盖了å„个方é¢çš„交互,从机器人直接的物ç†è¿åŠ¨ï¼Œåˆ°é€šè¿‡æœ€å°æƒ¯é‡æ„ŸçŸ¥å’Œæµä½“控制的物ç†äº¤äº’。å¦å¤–,考虑设计和控制之间的相互作用,以优化其功能。
社交交互机器人
对于机器人与人交互,赋予系统与人交互的设施。这ç§äº¤äº’,对于系统分é…任务ã€æ–°æŠ€èƒ½å’Œä»»åŠ¡çš„æ•™å¦ã€è”åˆä»»åŠ¡çš„执行ç‰ï¼Œéƒ½æ˜¯å¿…须的。当å‰ç¤¾ä¼šäº¤äº’模型包括手势ã€è¯éŸ³/声音ã€èº«ä½“è¿åŠ¨/姿æ€åŠç‰©ç†ä½ç½®ã€‚将技能和人类试图解释的现有和新的活动任务模型结åˆèµ·æ¥ã€‚在æœåŠ¡æœºå™¨äººé¢†åŸŸï¼Œå¯¹ç¤¾äº¤äº’动都具有广泛需求。
Micro inverter is a small inverter used in solar power generation systems, its main function is to convert the direct current generated by a single Solar Panel into alternating current. Unlike traditional centralized inverters, microinverters are usually equipped with one per solar panel, that is, each solar panel has an independent microinverter.
Main effect:
1. Individual control: The microinverter provides independent conversion control for each solar panel, which means that each solar panel can optimize its power output individually. This maximizes the power generation efficiency of the solar panels since shading or other influences only affect the power generation efficiency of individual panels, not the entire array.
2. Reliability: Since each solar panel is equipped with a micro-inverter, even if one of the inverters fails, the other panels can still work normally, thereby improving the reliability of the entire system.
3. Flexible installation: Micro-inverters are usually small and can be installed near solar panels without being concentrated in one location, so installation is more flexible and convenient.
Differences from other inverters:
1. Individual control: Compared with traditional centralized inverters, microinverters provide independent conversion control for each solar panel, enabling each panel to reach its maximum power output.
2. Fault isolation: The micro-inverter has the function of fault isolation. Even if one of the inverters fails, other panels can continue to work without affecting the operation of the entire system.
3. Installation method: The micro-inverter can be flexibly installed near the solar panel, and does not need to be concentrated in one location, so the installation is more flexible and convenient.
4. Applicable scale: micro-inverters are usually used in small-scale solar power generation systems, while traditional centralized inverters are suitable for larger-scale photovoltaic power plants.
Overall, the main role of microinverters is to individually control and optimize the power generation efficiency of solar panels and improve the reliability of the system. Compared with traditional centralized inverters, it has some advantages in terms of flexibility, fault isolation and applicable scale.
grid tie micro inverter, off grid solar micro inverter, hoymiles microinverter price, micro inverter solar system, solar system with micro inverters
Ningbo Autrends International Trade Co., Ltd. , https://www.aitsolarpanels.com